Our Method
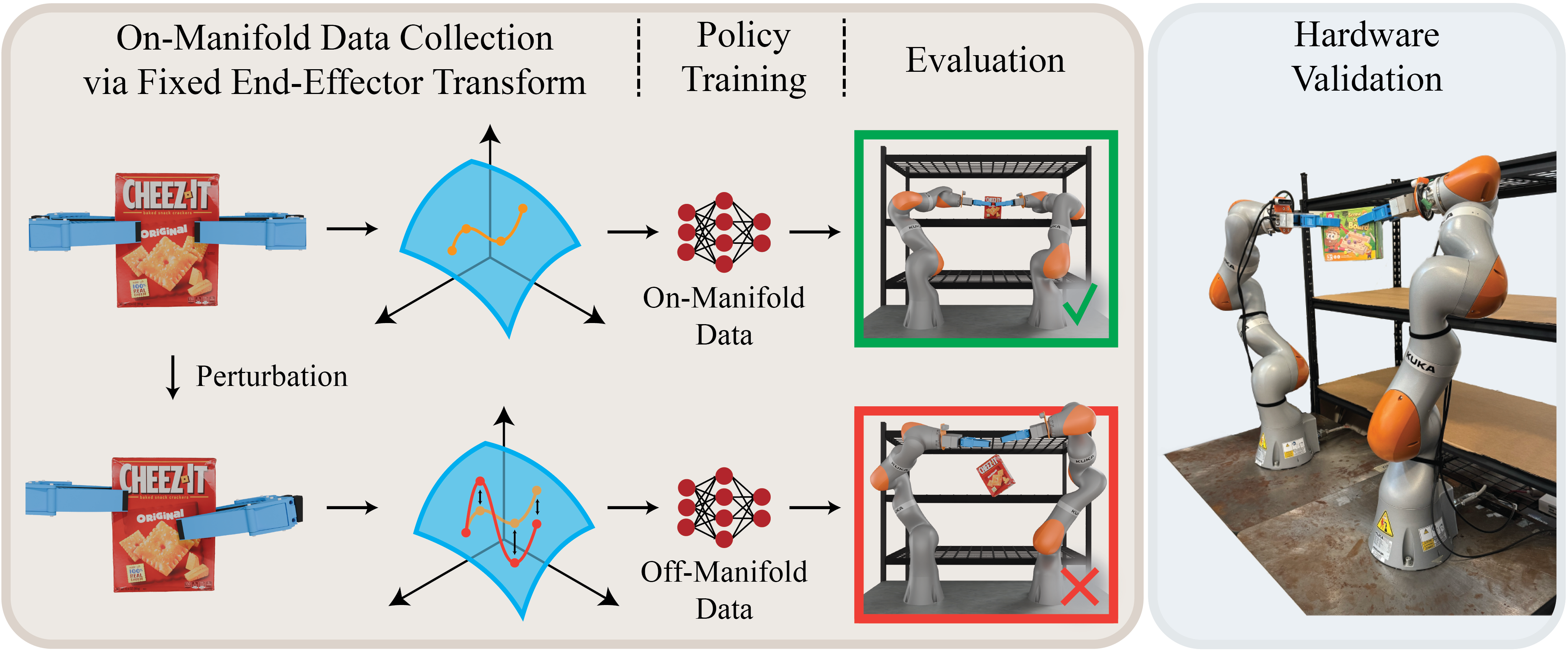
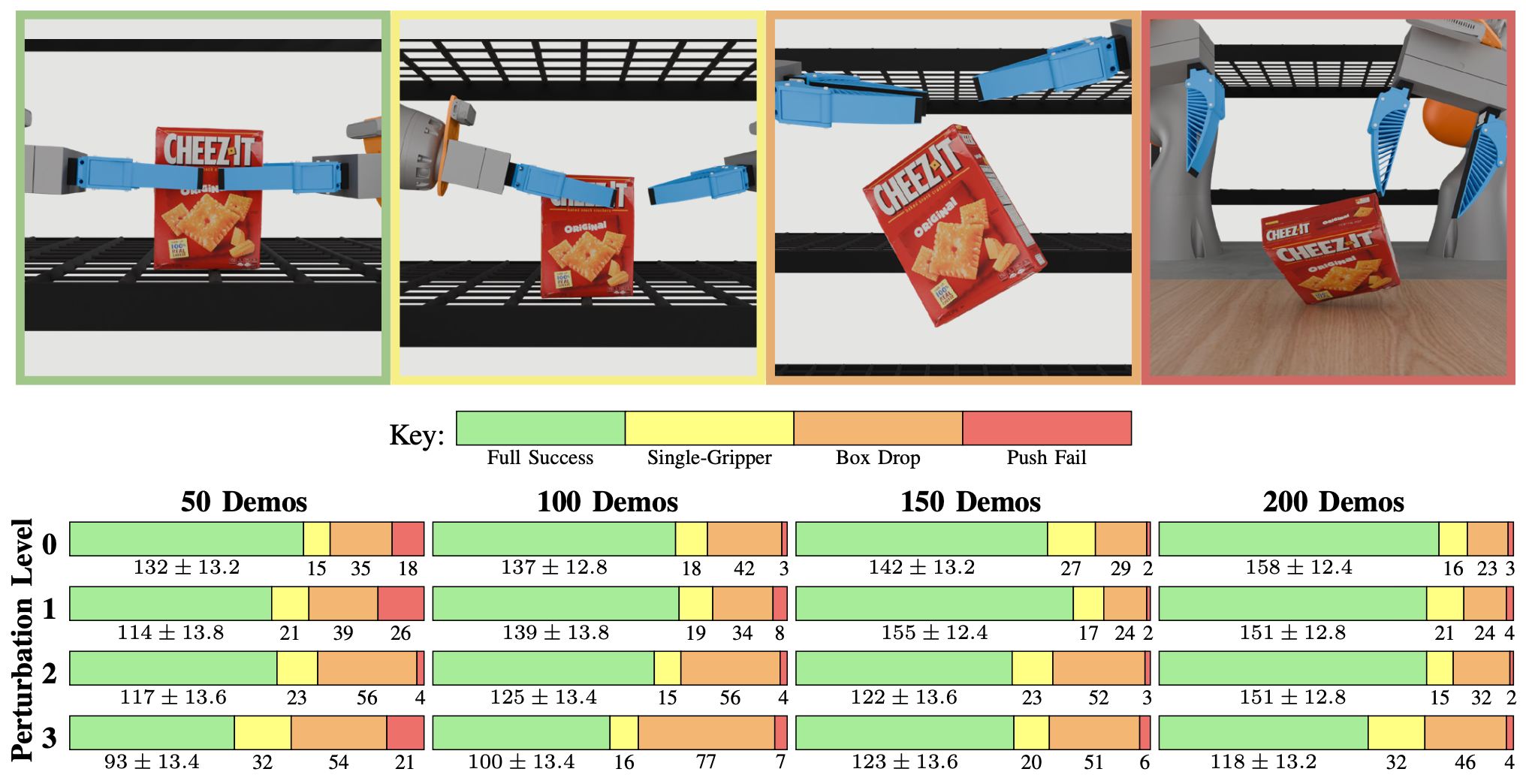
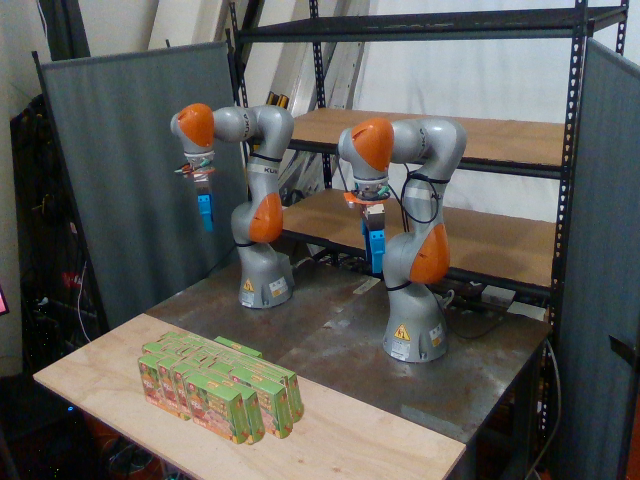
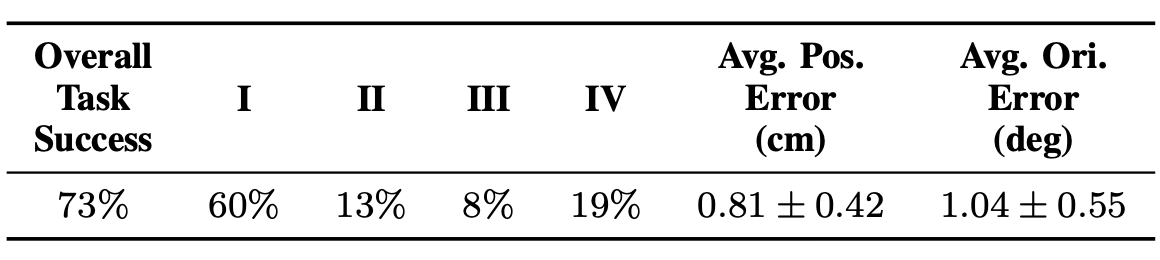
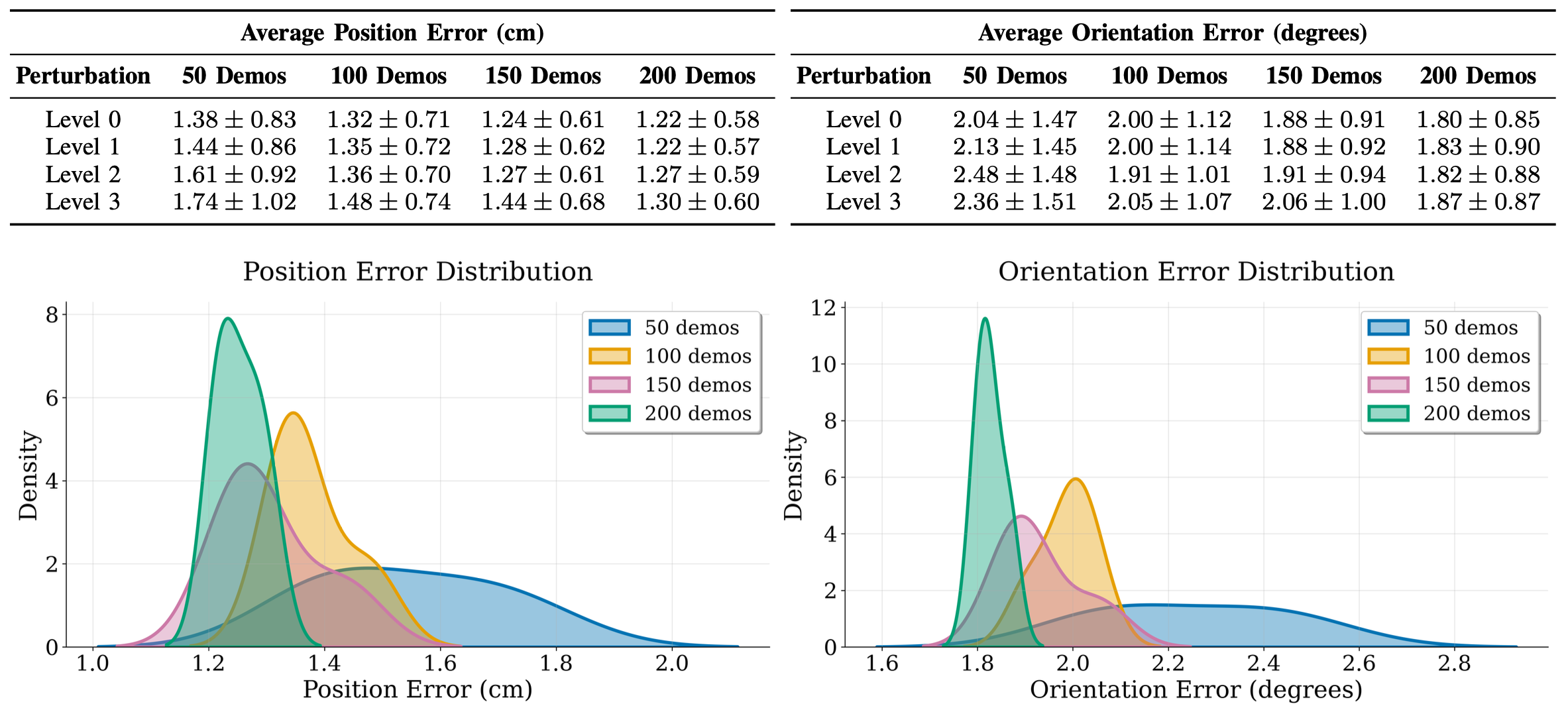
We collect teleoperation data for a constrained bimanual pick-and-place task. Then, we perturb end-effector poses via a random noising process to generate three additional datasets that still accomplish the task, but contain increasing constraint violations. We train a policy on each of these datasets and analyze task success and constraint adherence. Lastly, we collect demonstrations for the same task on hardware, train a policy, and evaluate its performance on similar metrics.